
El robot de pórtico consta de un marco de columna, un componente del eje X, un componente del eje Y, un componente del eje Z, un dispositivo y una caja de control.
Es un equipo industrial completamente automático basado en el sistema de coordenadas tridimensionales rectangulares X, Y, Z, que puede ajustar la posición de la pieza de trabajo o realizar el movimiento de trayectoria de la pieza de trabajo. Su núcleo de control se implementa a través de controladores industriales.
El controlador analiza y procesa varias señales de entrada, realiza juicios lógicos y luego emite comandos de ejecución a cada componente de salida para completar el movimiento conjunto entre los ejes X, Y y Z y realizar un conjunto completo de procesos operativos completamente automáticos.
Se utiliza en el ensamblaje y transporte de productos, sistemas de transporte y sitios de trabajo no tripulados. Puede usarse como un equipo periférico importante para almacenamiento temporal y logística y puede combinarse de manera flexible con el equipo anfitrión para facilitar su uso. Industrias de aplicación involucradas en: ensamblaje final, subensamble, procesamiento, prueba, depuración y transporte de productos, etc.
Las características del producto tienen como objetivo ayudar a los clientes a resolver los problemas de baja eficiencia o altos riesgos de manipulación en varios tipos de manejo de materiales, para reducir de manera conveniente y rápida los riesgos de manipulación, ahorrar tiempo, esfuerzo, ahorrar mano de obra e incluso reemplazar la mano de obra.
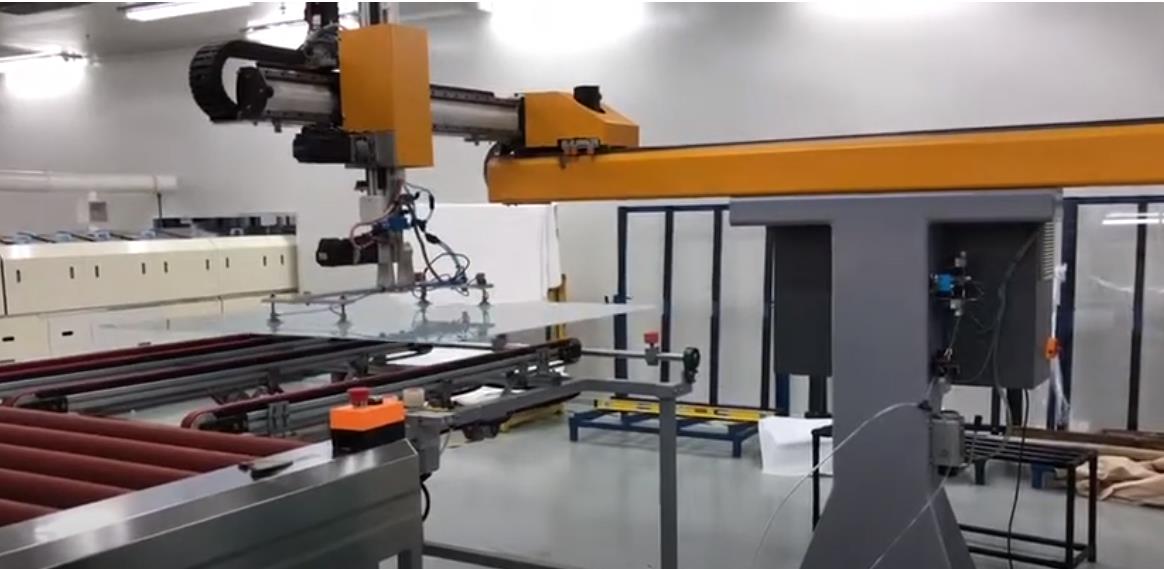
 Este dispositivo de manipulación de vigas de pórtico para vidrio incluye columnas y vigas transversales instaladas en las columnas. Las vigas transversales se instalan con rieles deslizantes. Los carriles deslizantes se instalan con un dispositivo de deslizamiento transversal. El dispositivo de deslizamiento transversal se instala con un dispositivo de deslizamiento vertical y un dispositivo de ventosa neumático. Se puede realizar: el mecanismo de transporte se mueve en un punto fijo en el espacio tridimensional, aspira el vidrio a través de la ventosa, primero se mueve lateralmente en el eje X, luego gira 90 grados hasta la posición designada y luego se mueve hacia arriba. y hacia abajo en el eje Y. Después de alcanzar la posición establecida, suelte el vaso y colóquelo en el estante de vidrio. La estabilidad estructural de todo el dispositivo es muy alta, lo que mejora enormemente el manejo. eficiencia.
Este dispositivo de manipulación de vigas de pórtico para vidrio incluye columnas y vigas transversales instaladas en las columnas. Las vigas transversales se instalan con rieles deslizantes. Los carriles deslizantes se instalan con un dispositivo de deslizamiento transversal. El dispositivo de deslizamiento transversal se instala con un dispositivo de deslizamiento vertical y un dispositivo de ventosa neumático. Se puede realizar: el mecanismo de transporte se mueve en un punto fijo en el espacio tridimensional, aspira el vidrio a través de la ventosa, primero se mueve lateralmente en el eje X, luego gira 90 grados hasta la posición designada y luego se mueve hacia arriba. y hacia abajo en el eje Y. Después de alcanzar la posición establecida, suelte el vaso y colóquelo en el estante de vidrio. La estabilidad estructural de todo el dispositivo es muy alta, lo que mejora enormemente el manejo. eficiencia.

Hora de publicación: 18-mar-2024



